
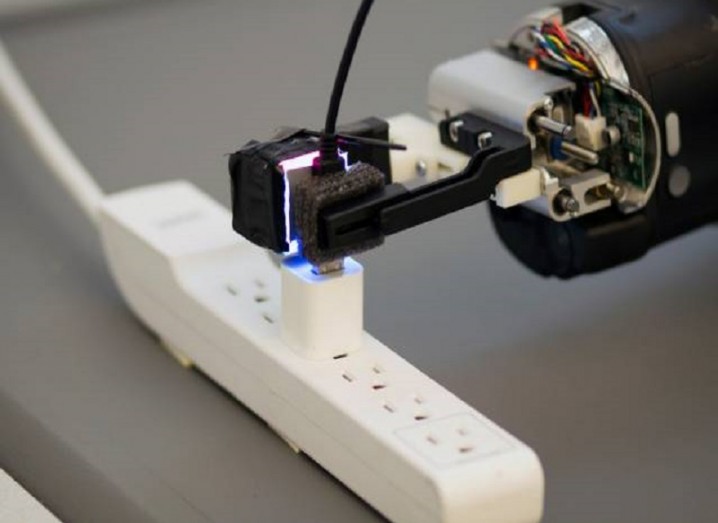
Photo: Melanie Gonick/MIT
Researchers at the Massachusetts Institute of Technology (MIT) and Northeastern University in the US have equipped a robot with a tactile sensor that lets it grasp a USB cable and insert it into a USB port.
The sensor uses a technology called GelSight and, though not as sensitive as the original GelSight sensor (which was developed in 2009), it’s small enough to fit on a robot’s gripper and processes algorithm faster, allowing the robot to receive feedback in real time. According to researchers, this level of dexterity is unprecedented.
“People have been trying to do this for a long time and they haven’t succeeded because the sensors they’re using aren’t accurate enough and don’t have enough information to localize the pose of the object that they’re holding,” Robert Platt, an assistant professor of computer science at Northeastern, told the MIT news office.
Researchers allowed a 3mm margin in where the robot took hold of the USB plug. Despite this, the machine was able to measure its position accurately enough to insert the plug into a port that allowed approximately a millimeter’s error. The team have presented their results at the International Conference on Intelligent Robots and Systems.
MIT have produced a short video that details the new GelSight sensor and USB demonstration.




